的基本性能要求,目前常用驱动电机类型最重要的包含三大类,即交流异步电机、永磁同步电机和开关磁阻电机。目前,各车企配套车型统计中,每个车型选用的驱动电机类型也有所不同。
因此,要进行新能源汽车搭载电机类型选用,了解驱动电机的结构、工作原理和性能优缺点非常重要。
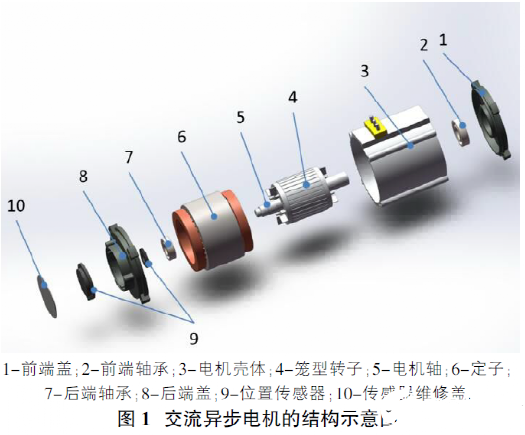
交流异步电机,也称感应电机,结构最重要的包含定子、转子、电机轴、前后轴承、端盖、位置传感器温度传感器、低压线束和高压动力线束。定子由定子铁心和三相绕组组成;转子常用笼型转子,包括转子铁心和笼型绕组。根据电机的功率不同会选择水冷或者风冷方式。(图1)
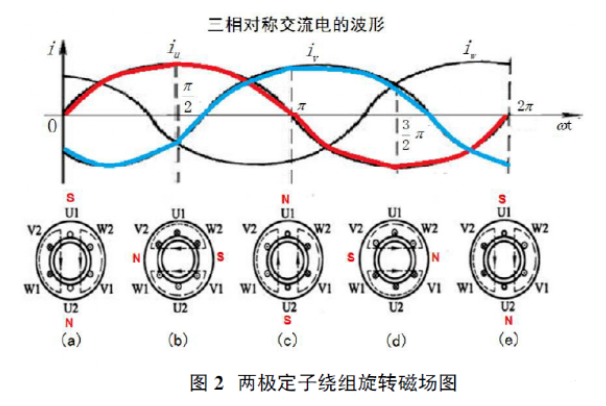
交流异步电机要驱动提供扭矩,需要在定子线圈中通入三相交流电,产生不断旋转的磁场(磁场转速为ns)。交流异步电机要求定子三相绕组必须对称,并且定子铁心空间上互差120度电角度;通入三相对称绕组的电流也必须对称,大小、频率相同,相位相差120度。旋转磁场的转速,见式(1)。
式中,ns为旋转磁场的转速(也称同步转速),r/min;f为三相交流电频率,Hz;p为磁极对数。对已经设计定型生产的驱动电机,磁级对数已经确定,因此决定磁场旋转速度的因素为三相交流电频率。由于我国的电网频率f=50Hz,因此电机的转速和磁极对数有线笼型转子提供感应涡流
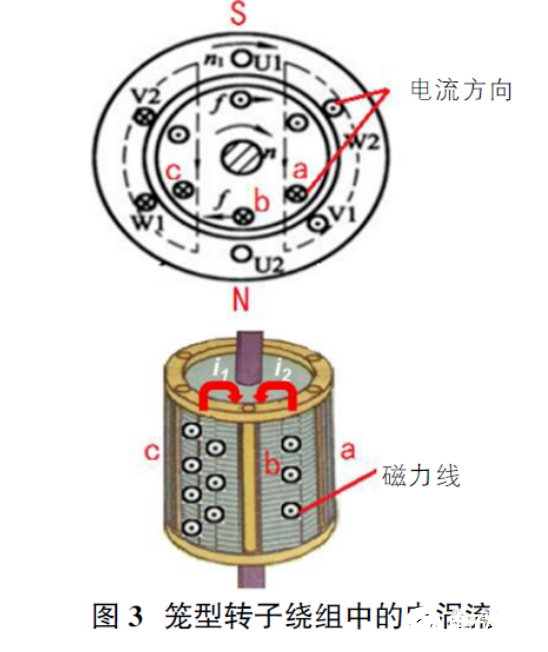
由于定子提供旋转的磁场,笼型转子导体上感应出电涡流,如图3所示。在笼型绕组导体c和b之间的导磁区域内,有向外的磁力线,并且该磁力线在旋转磁场的作用下增强,因此,导体c、b上会感应出i1电涡流;同理,导体a和导体b区域内减弱的磁力线电涡流。导体b上的电流在定子旋转磁场的作用下,会使笼型绕组b导体受到电磁力,从而使转子产生电磁转矩,旋转起来。旋转的转子逐渐追上旋转磁场,以比磁场的“同步速度ns”稍慢的速度n旋转。这种转子的旋转速度n比定子磁场的速度ns稍慢的现象称为转子发生了转差,这种异步转差,让笼型转子导体持续切割磁力线产生感应电涡流,由此,在转子上,电能转化成
定律,闭合电路的一部分导体在磁场里切割磁感线的运动时,导体中就会产生感应电流,产生的电动势成为感应电动势。在交流异步电机中,电动机作为发电机时,定子中的通入三相电流为激磁电流,提供磁场,转子上绕组提供导体,当通过外部机械力,比如汽车驱动轴带动转子轴,从而带动转子运动时,如果转子上的转速高于定子旋转磁场的同步转速,此时交流异步电机即为发电机,转子此时切割旋转磁场的方向与作为驱动电机转子工作时相反,因而转子感应电动势的方向也相反。在发电过程中,电机转子受到与外力拖动相反的电磁阻力矩,使转子速度下降。
交流异步电机的优点是输出扭矩可以在大范围内调整,能在加速或者爬坡时短时间之内强制提高输出扭矩,永磁同步电机的电驱动汽车通常通过增加齿轮箱机构来增加扭矩以提升速度。但是交流异步电机的缺点是电机由于单边励磁,启动电流比较大,产生单位转矩需要的电流比较大,而且定子中存在无功励磁电流,因此能耗比永磁同步电机大,
功率因数滞后;重载驱动时常出现过负荷现象;结构相对复杂,其控制技术方面的要求高,制造成本高;功率密度相对低。目前,美国研制的电驱动汽车多采用交流异步电机作为驱动电机。
嵌入式永磁转子和内置式永磁转子,目前新能源电机常用内置式永磁转子。(图4)
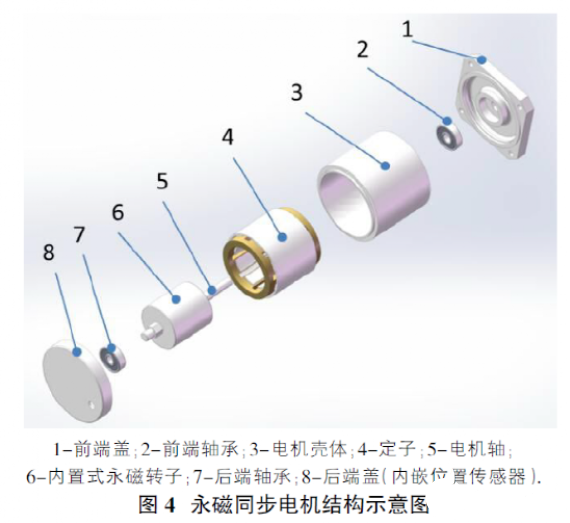
由定子提供旋转的磁场,磁场产生的方式和转速与交流异步电机相同。由转子永磁体提供磁极。这样,定子产生的旋转磁场,与转子永磁体磁极和转子铁心,形成回路。根据磁阻最小原理,即磁通总是沿磁阻最小的路径闭合,利用旋转磁场的电磁力拉动转子旋转,于是永磁转子就会跟随定子产生的旋转磁场同步旋转,从而带动电机轴旋转。
永磁同步电机的优点是体积小,质量轻,功率密度高,相比于异步电机能耗小,温升低,效率高。能够准确的通过需求,设计成高启动转矩,高过载能力的结构电机。永磁同步电机严格同步,动态响应性能较好,适合变频控制,调整电流与频率即可很大范围调整电机的转矩和转速。但是,永磁同步电机中永磁材料一般会用钕铁硼强磁材料,这样一种材料较为脆硬,受到强烈震动有可能碎裂;而且转子采用永磁材料,在电机使用和过温情况下会出现磁衰退,造成动力下降。目前,永磁同步电机在新能源汽车电机中应用较为广泛,亚洲和欧洲新能源市场主要是采用永磁同步电机作为新能源电机。
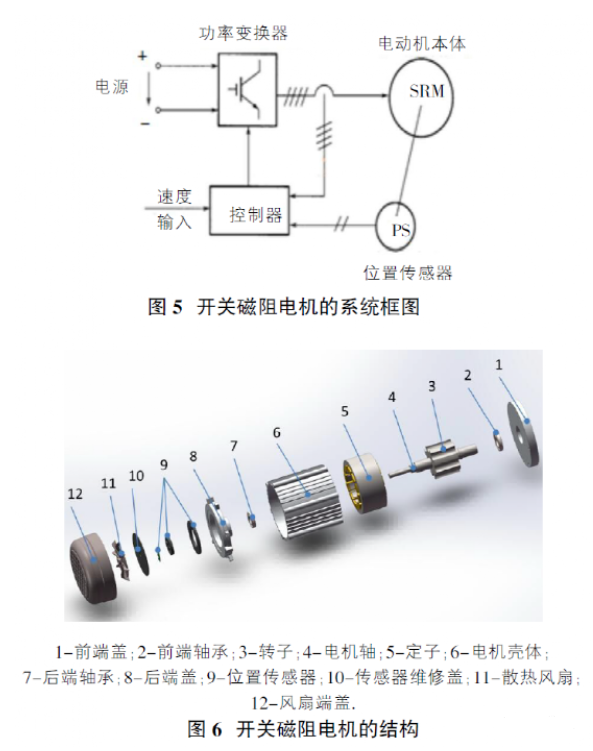
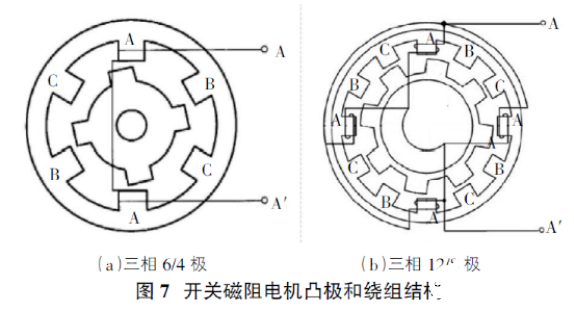
控制器四部分,如图5所示。开关磁阻电动机本体主要结构包括定子、转子、位置传感器、前后轴承、前后端盖和电机壳体等,如图6所示。其中,定子包括定子铁心和绕组。定子铁心和转子都采用凸极结构,定子凸极铁心和转子都由硅钢片叠加而成,定子凸极上布置绕组,转子无绕组和永磁体。
三相6/4极结构表明电动机定子有6个凸极,转子有个凸极,其中在定子相对称的两个凸极上的集中绕组互相串联,构成一相,相数为定子凸极数/2,如图7(a)所示。三相12/8极结构表明电动机定子有12个凸极,转子有8个凸极,其中在定子的4个两两对称凸极上的绕组互相串联,构成一相,相数为定子凸极数/4,如图7(b)所示。
开关磁阻电机相数越多,步进角越小,运转越平稳,越有利于减小转矩波动,但控制越复杂,以致主开关器件增多和成本增加。
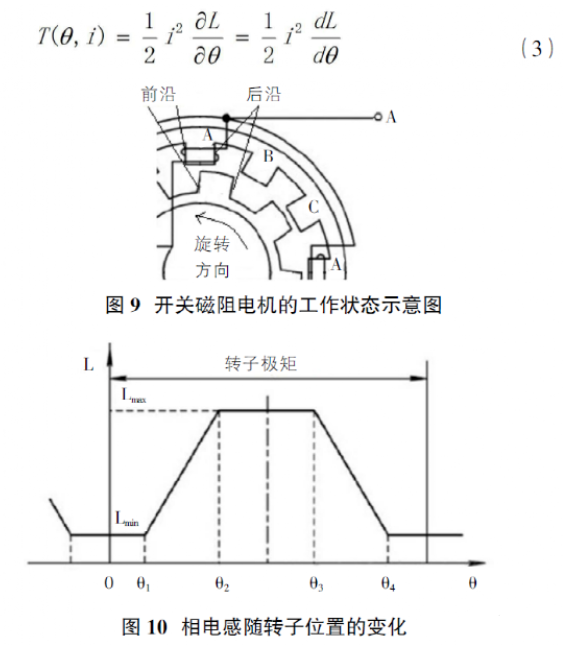
由图8中的三相12/8极开关磁阻电机工作原理图可知,当A相绕组电流控制主开关S1、S2闭合时,A相通电励磁,电动机内所产生的磁场力以OA为轴线的径向磁场,该磁场磁力线在通过定子凸极与转子凸极的气隙处是弯曲的,此时,磁路的磁阻大于定子凸极与转子凸极重合时的磁阻,因此,转子凸极受到磁场拉力的作用,使转子极轴线Oa与定子极轴线OA的重合,由此产生磁阻性质的电磁转矩,使转子逆时针转动起来。关断A相电,建立B相电源
,则此时电机内磁场旋转30度,则转子在此时电磁拉力的作用下,连续逆时针旋转15度。如果顺序给A-B-C-A相绕组通电,则转子就按逆时针方向连续转动起来;当各相中的定子绕组轮流通电一次时,定子磁场转过3×30度,转子转过一个转子极距3×15度(即360度/转子凸极数)。如果依次给A-C-B-A相绕组通电,则转子会沿着顺时针方向转动。开关磁阻电动机与电流的方向无关,取决于对定子相绕组的通电顺序。在多相电动机的实际运行中,也常常会出现两相或两相以上绕组同时导通的情况。
开关磁阻发电机工作状态相电感存在三种状态,励磁状态、续流状态和发电状态,其相电感L波形如图10所示。
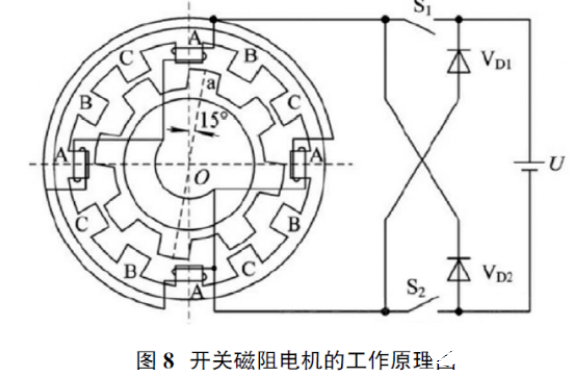
图9中,θ角定义为该相转子齿极轴线与定子齿槽轴线之间的夹角。转子齿极轴线与相应的定子齿槽轴线重合时,该相电感最小(定义为θ=0°);直至转子凸极的前沿与定子凸极的后沿相遇时(θ=θ1),绕组相电感从始至终保持Lmin不变;当转子继续转动,转子凸极开始和定子凸极出现重合,直至转子凸极后沿和定子凸极后沿完全重合(此时θ=θ2),绕组相电感在此区域内线性上升,直至最大值Lmax;当转子继续转动至转子凸极的前沿和定子凸极的前沿重合时,此时θ=θ4,该相电感持续Lmax。
如果开关磁阻电机的绕组在θ3和θ4之间开通和关断,则电机作发电机机运行。此时,在电感下降区形成电流,则dL/dθ<0,此时相绕组有电流通过,则产生制动转矩(T(θ,i)<0),若外界机械力维持电机转动,则电机吸收机械能,并把它转换成电能输出,此时开关磁阻电机为发电机工作模式。
而且,由于每种电机的结构和原理不同,应用场景范围也大不相同。依照国家的产业战略规划,围绕环保型新能源汽车的电驱动系统方向进行的研究将会慢慢的广泛,电机种类和技术水平也会逐步的提升。
